Calibration d'une caméra (professionelle ou grand public)
La bonne réussite d'une calibration dépend de plusieurs facteurs:
- de l'utilisation et de la précision que l'on attend de cette calibration. Si l'on veut mesurer un immeuble à 10 cm prés, une calibration n'est pas nécessaire.
- de l'appareil photo et de la qualité de l'objectif de cet appareil.
- une focale fixe avec débrayage de l'autofocus est nécessaire si l'on vue des résultats acceptables.
- de la précision XYZ et du nombre de cibles qui serviront à cette calibration.
- de la précision de pointé de ces cibles sur les photos
- du type de calibration que l'on fera; Focale et PPA, correction radiale ou correction en Grille.
1) Les exigences de la caméra
Si l'on veut position le centre perspectif de la caméra par des mesures topographiques ou GPS, la position de l'axe du fond de chambre doit être définie.
On doit pouvoir déterminer de façon précise la position de l'axe de la rotule du support d'appareil dans le système caméra.
Voir chapitre Menu Pour Importer/Exporter un fichier de trajectographie (points GPS et angles).
Tous les automatismes d'autofocus doivent être débrayables afin de garantir que la focale soit stable et que la mise au point reste à l'infini.
Vous devez connaitre la taille réelle du capteur et vérifier que le rapport Hauteur/Largeur de cette taille est en correspondance avec celui en pixels (24mm/36mm = 2400pix/3600pix).
Si ce n'est pas le cas , on recalcule une Hauteur/Largeur de capteur pour que ce rapport corresponde exactement à celui des pixels.
2) Trouver le centre perspectif d'une caméra numérique et les offsets.
Nous proposons une méthode simple qui permet de trouver la position du centre perspectif d'une caméra.
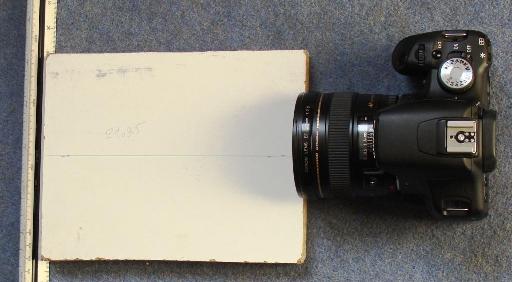
Selon la photo ci-dessous, Photographier une règle graduée ou un kutch.
Mettre une ouverture très faible et une mise au point à l'infini ou sur une focale connue.
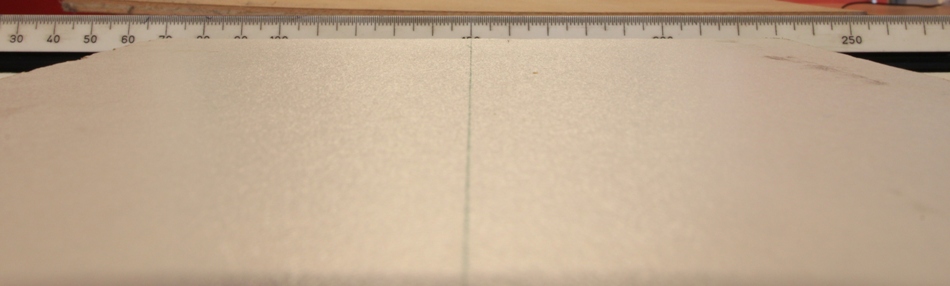
Vous obtenez une photo de ce type :
Grace à la photo, vous pouvez lire la distance de l'objet photographié, correspondant à la largeur du capteur.
Mesure_Kutch_Lu_Sur_La_Photo = 277mm-25mm = 252mm .
On obtient la hauteur entre le Centre perspectif et le Kutch par la formule :
Dist_Kutch_CP = Focale / Taille_Capteur * Mesure_Kutch_Lu_Sur_La_Photo,
Connaissant la position de ce centre perspectif, il est facile de trouver les offsets de la rotule d'un pied de caméra dans le système d'axe passant par ce
centre perspectif. Par exemple pour trouver 'oz' = offset Z, on peut placer la caméra selon la figure suivante et mesurer la hauteur de l'axe de la rotule par
rapport à la table et de déduire la constante qui permet de se placer au niveau du centre perspectif.

3) Préparation de la calibration et méthode théorique.
Partons du principe que l'on veut calibrer l'appareil à 1/2 pixel près et que notre appareil a une résolution de 4000x5000 pixels (20 millions de pixels).
Si l'on veut mesurer par voie topographique l'on veut conforter la calibration par des mesures topographique, si notre photo couvre une surface de 50 x 50
mètres, la précision des XYZ fournie devra être de 50/5000*05 mètres soit 5 mm.
La meilleure solution pour calibrer une caméra est d'utiliser la corrélation Automatique.
Il faut photographier de plusieurs endroit, un lieu qui se prête bien à l'autocorrélation.
Image non lisse et non répétitive.
Par exemple murs de pierres naturelles, Flancs de montagnes,
Sol pris d'une terrasse ou en aérien.
Eviter les lieux artificiels, ils sont souvent composé de surfaces lisses ou de motifs répétitifs.
Pour calculer les coefficients de correction radiale et de pincushion de
façon précise, il faut corréler des images décalées.
Pour calculer correctement la focale sans mesures de points fixes, il faut photographier un même lieu sous des angles différents.
Ainsi, un même point aura des profondeurs tés différentes selon l'inclinaison de l'axe de prise de vue.
Le calcul de focale sera possible.
Certains dossiers, avec beaucoup de points d'appuis avec un champ de
profondeurs important se prêtent à une calibration de camera
4) Exemple de méthode pour calibrer une caméra
Cette méthode consiste à prendre un lieu se prêtant à l'autocorrélation, avec un nombre de photos, décalées et prisent sous des angles différents, comme
précisé au chapitre précédent.
a) Définition de la caméra.
Ne pas oublier de cocher la liste des corrections que l'on veut calculer () ,
placer le type de focale a
et à supprimer toute forme de calibration autre que les coefficients approchés KRADIAL et KPINCUS approchés s'ils existent.
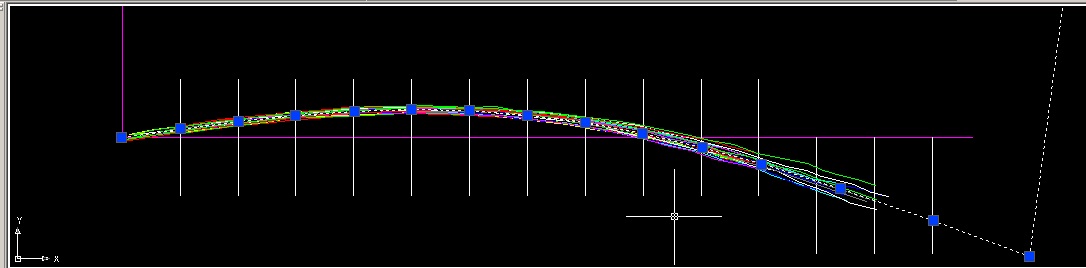
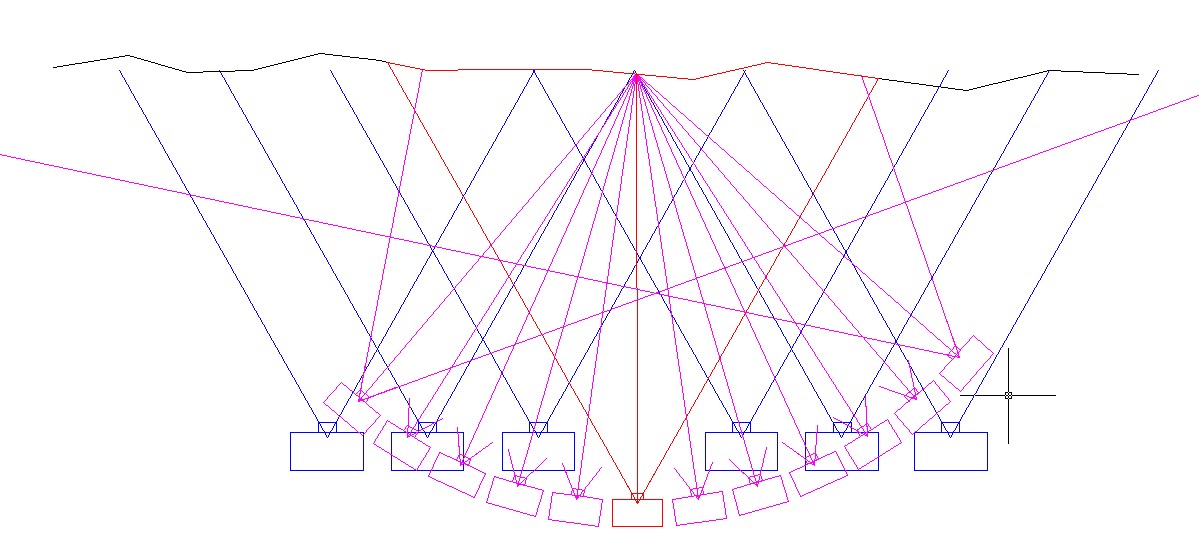
b) Position des prise de vues.
Dans le schéma suivant, la prise de vue de référence est en rouge, les prises de
vues parallèles en Cyan et les obliques en Magenta.
Il faut éviter de prendre plusieurs clichés du même endroit. En
effet, le logiciel refuse la corrélation de deux clichés
ayant le même centre perspectif . Les visées en sifflet (écart CP / Distance
objet inférieur à 1%) sont éliminées.
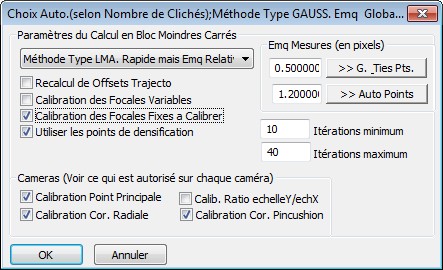
c) Calcul des éléments de calibration.
Valider le calcul de calibration de caméra dans les paramètres de calculs en
bloc :
Le calcul de calibration fait partie intégrante du calcul en bloc.
Il
suffit donc de lancer une corrélation automatique pour obtenir les résultats
attendus.
Il est judicieux de commencer par faire cette corrélation automatique sur
quelques clichés pour obtenir des résultat approchés.
Ayant des valeurs
approchés, refaire une nouvelle corrélation avec l'ensemble des clichés.
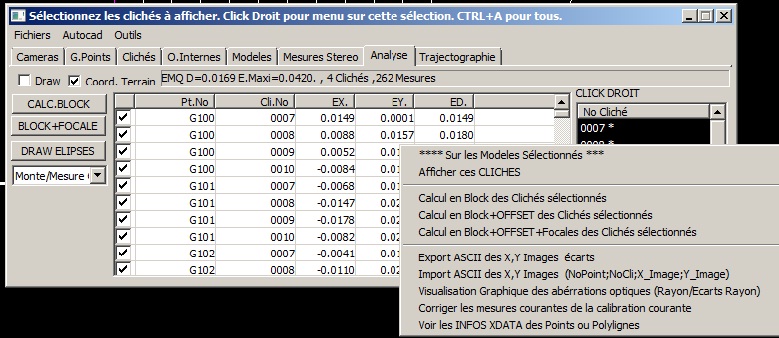
c) Outils de visualisation des écarts.
Les outils relatifs à la calibration s'appliquent sur une sélection de clichés et se trouvent dans le menu suivant:
Pour sauvegarder les mesures courantes de l'image.